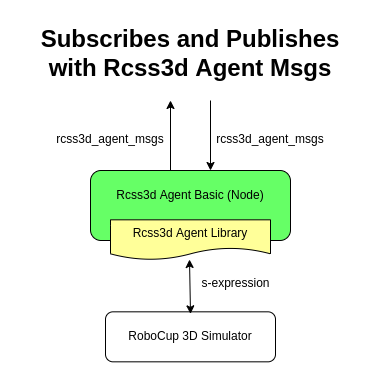
Rcss3d Agent Basic
Rcss3d Agent Basic is a ROS2 Component that can run as a standalone application. The term Basic comes from the node closely mimicking the interface provided by SimSpark. Custom ROS2 interfaces are used with no attempt at converting the interfaces to those you would probably use to communicate with a real robot.
See also
If you wish to publish and subscribe to topics with different interfaces, you should use the rcss3d_agent library and implement the pub/sub yourself, see Rcss3d Agent for more information.
Starting the Simulator
In a terminal, start the simulator by running:
rcsoccersim3d
Tip
Simulator tends to crash sometimes when connecting / disconnecting agents, which leaves unwanted
server processes lingering. To kill this process, run pkill -9 rcssserver3d before restarting
the simulation server.
Launching a Player
To run rcss3d_agent_basic as a standalone application, in a new terminal, run:
ros2 run rcss3d_agent_basic rcss3d_agent_basic
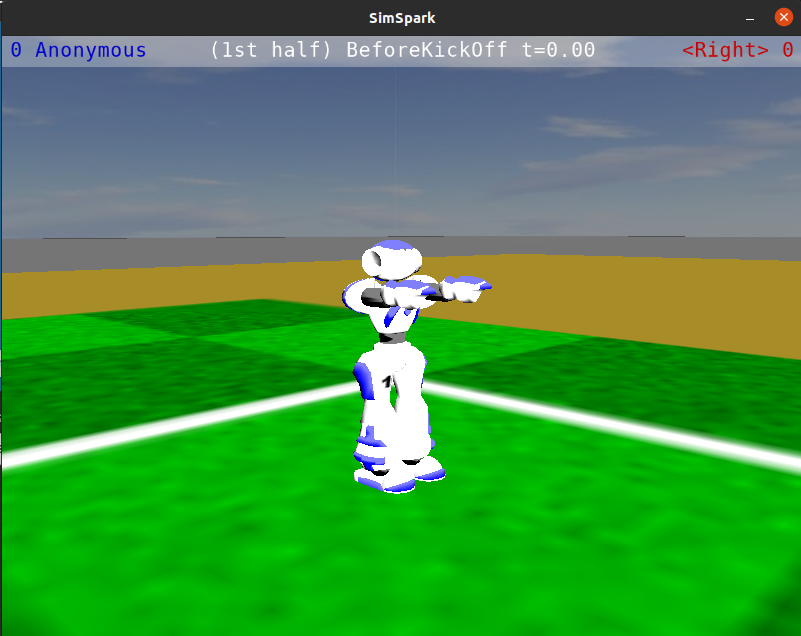
Moving around the simulator camera with the WASD keys and the mouse, you should see your robot at the corner of the field, as below:
Beaming the Robot
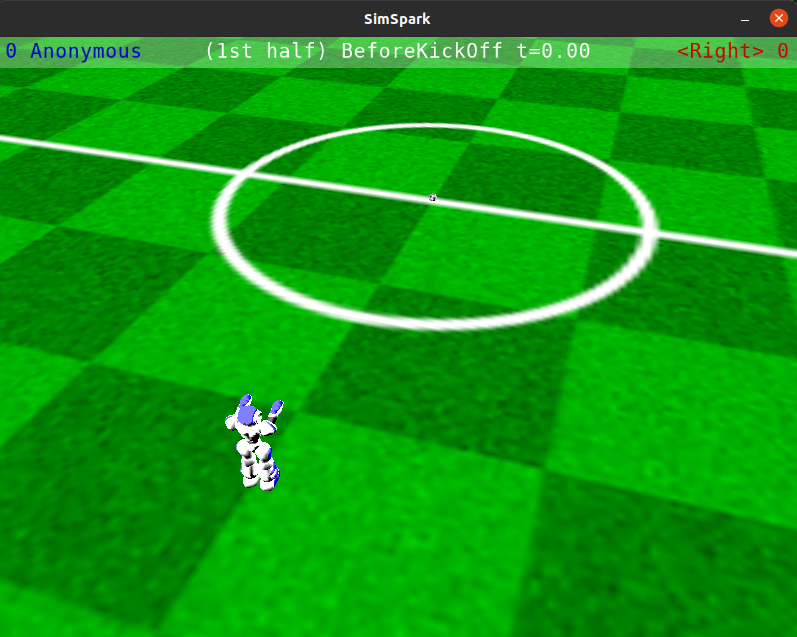
The Beam Effector allows a player to position itself on the field before the start of each half. In this example, we will move the robot to four metres behind the centre circle, facing it. The coordinate of the robot after beamed will be (-4.0, 0.0, 0.0).
In a new terminal, run:
ros2 topic pub --once effectors/beam rcss3d_agent_msgs/msg/Beam "
x: -4.0
y: 0.0
rot: 0.0
"
In the simulator, you should see the robot has moved to the requested pose as below:
Moving a Hinge Joint
To send a hinge joint command to the simulated robot, you must publish
a rcss3d_agent_msgs/msg/HingeJointVel msg on the effectors/hinge_joint topic.
In this example, we will set the velocity of the head yaw to be 1.0. In a new terminal, run:
ros2 topic pub --once effectors/hinge_joint rcss3d_agent_msgs/msg/HingeJointVel "
name: 'he1'
ax: 1.0
"
In the simulation, you should see the robot turn its head left until it hits the joint limit as following:
See also
For a list of the name of hinge joint effectors, refer to RoboCup 3D Simulation League’s Nao model.
Moving a Universal Joint
To send a universal joint command to the simulated robot, you must publish
a rcss3d_agent_msgs/msg/UniversalJointVel msg on the effectors/universal_joint topic.
The default Nao robot model doesn’t have any universal joints. The example below shows how to move the universal shoulder joint of SimSpark’s SoccerBot:
ros2 topic pub --once effectors/hinge_joint rcss3d_agent_msgs/msg/HingeJointVel "
name: 'lae1_2'
ax1: 1.0
ax2: -1.0
"
Communicating with Other Agents
The Say Effector permits communication among agents by broadcasting messages. Be sure to read about this effector’s dual, the Hear Perceptor, as it details restrictions upon what message content may be sent, and under what circumstances other agents will actually hear your messages.
In this example, we will send a msg containing the string “helloworld”:
ros2 topic pub --once effectors/say rcss3d_agent_msgs/msg/Say "message: 'helloworld'"
Synchronize Effector
The Synchronize Effector must be used if the simulator is running with Agent Sync Mode. In Agent Sync Mode, agents must publish this message at the end of each simulation cycle. Note that the server ignores this command if it is received in Real-Time Mode, so it is safe to configure your agent to always publish this message.
In the example below, we will publish a message on the effectors/synchronize topic
at 100Hz:
ros2 topic pub --rate 100 effectors/synchronize rcss3d_agent_msgs/msg/Synchronize
We can confirm that the simulator is responding to the synchronize message by printing the publish
rate of the /percept topic with:
ros2 topic hz percept
The average rate should be close to the rate at we are sending our synchronize effector (ie. 100Hz).
Topics
List of topics used by the node.
Published Topics
percept (rcss3d_agent_msgs/msg/Percept)
Subscribed Topics
effectors/beam (rcss3d_agent_msgs/msg/Beam)
effectors/hinge_joint (rcss3d_agent_msgs/msg/HingeJointVel)
effectors/say (rcss3d_agent_msgs/msg/Say)
effectors/universal_joint (rcss3d_agent_msgs/msg/UniversalJointVel)
effectors/synchronize (rcss3d_agent_msgs/msg/Synchronize)
Parameters
List of parameters for the node.
model (string, default=”rsg/agent/nao/nao.rsg”)
The RSG model of the robot, model path must be relative to and inside
/usr/local/share/rcssserver3d/rcss3d/host (string, default=”127.0.0.1”)
Host IP Address that simulation server is running on
rcss3d/port (int, default=3100)
Port number that simulation server is communicating on
team (string, default=”Anonymous”)
Team name of robot, to be sent to simulation server
unum (int, default=0)
Player number of robot, to be sent to simulation server