Rcss3d Agent
Rcss3d Agent is a general ROS2 C++ library that handles the network connection and parsing/packing of data from/to the format that the simulator understands (s-expressions).
Introduction
For 3D simulation teams, the provided Rcss3d Agent Basic node which is built on top of the Rcss3d Agent library is likely all that is needed. Teams from other leagues such as the humanoid league or SPL, can use the general library and provide their own pub/sub implementations to match those used on their robots.
An example usage of this library is in the rcss3d_nao package that publishes/subscribes using interfaces specific to the Nao (nao_command_msgs and nao_sensor_msgs), such that a real Nao robot can be substituted out for a simulated one seamlessly.
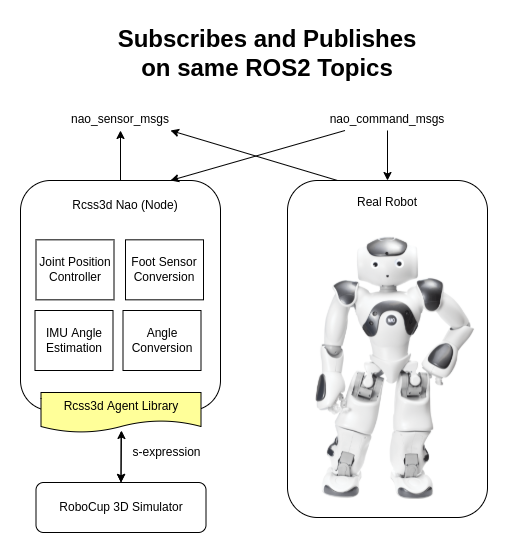
Rcss3d Nao attempts to bridge the discrepancy between the simulator and a physical robot.
For example, a physical Nao robot accepts joint position commands, but the simulator accepts joint velocity commands. Rcss3d Nao implements a joint velocity controller to convert the requested joint position to a joint velocity that the simulator accepts.
Usage
To use this package in your ament project, you must declare it as a dependency in your package, as following:
// In your package.xml
<depend>rcss3d_agent</depend>
// In your CMakeLists.txt
find_package(rcss3d_agent REQUIRED)
ament_target_dependencies(your_target rcss3d_agent)
To use the package in a C++ file, simply include the following header file:
#include "rcss3d_agent/rcss3d_agent.hpp"
API
The rcss3d_agent::Rcss3dAgent class is the core of the library. Constructing an Rcss3dAgent object will launch a new agent in the simulator. Destroying the object will disconnect the agent from the simulator.
Constructor
The constructor takes exactly one parameter of type rcss3d_agent::Params. An example
is given below:
// Example parameters
std::string model = "rsg/agent/nao/nao.rsg" // Rsg robot model relative to /usr/local/share/rcssserver3d/
std::string rcss3d_host = "127.0.0.1"; // IP Address of Simulation Server (default: 127.0.0.1)
int rcss3d_port = 3100; // Port of Simulation Server (default: 3100)
std::string team = "ROS Sports"; // Team name
int unum = 3; // Player number
// Construct rcss3d_agent::Params
rcss3d_agent::Params params{model, rcss3d_host, rcss3d_port, team, unum};
// Construct rcss3d_agent::Rcss3dAgent
rcss3d_agent::Rcss3dAgent rcss3dAgent{params};
The agent is connected to the simulator through localhost(127.0.0.1) on port 3100 by
default.
Important
params must outlive rcss3dAgent, or
rcss3dAgent will have a dangling reference to the params object which
will cause undefined behaviour.
Perceptor callback
To be notified about perceptor information, you must register a callback function using the
registerPerceptCallback method.
// Register callback methods
void registerPerceptCallback(
std::function<void(const rcss3d_agent_msgs::msg::Percept &)> callback);
Your callback function must accept a
const rcss3d_agent_msgs::msg::Percept & and have no return value.
// A callback definition somewhere
void perceptCallback(const rcss3d_agent_msgs::msg::Percept & percept);
// Registering the callback
rcss3dAgent.registerPerceptCallback(perceptCallback);
Tip
If you’re registering a class method as the callback from within the class,
you can use std::bind with std::placeholders, as following:
rcss3dAgent.registerPerceptCallback(
std::bind(&YourClass::perceptCallback, this, std::placeholders::_1));
The rcss3d_agent_msgs/msg/Percept parameter contains information sent from the simulator to the agent in a simulation cycle, and contains:
Sensor Data - gyroscope, joints, FSRs, accelerometers
Vision Data - ball, field lines, flags, goalposts, other players
Game State - time, playmode
Agent State - temperature, battery
Messages from other players
An example of a callback that prints the simulator time received from the simulator to std::cout:
#include <iostream>
void perceptCallback(const rcss3d_agent_msgs::msg::Percept & percept)
{
std::cout << "Time: " << percept.game_state.time << std::endl;
}
See also
See rcss3d_agent_msgs/msg/Percept for msg field details
Effector methods
The following are the four methods to effect the agent:
void sendBeam(const rcss3d_agent_msgs::msg::Beam & b);
void sendHingeJointVel(const rcss3d_agent_msgs::msg::HingeJointVel & j);
void sendUniversalJointVel(const rcss3d_agent_msgs::msg::UniversalJointVel & j);
void sendSay(const rcss3d_agent_msgs::msg::Say & s);
void sendSynchronize();
Detailed explanations and usages are given below.
Beam
The Beam Effector allows a player to position itself on the field before the start of each half. The following method is used for this:
void sendBeam(const rcss3d_agent_msgs::msg::Beam & b);
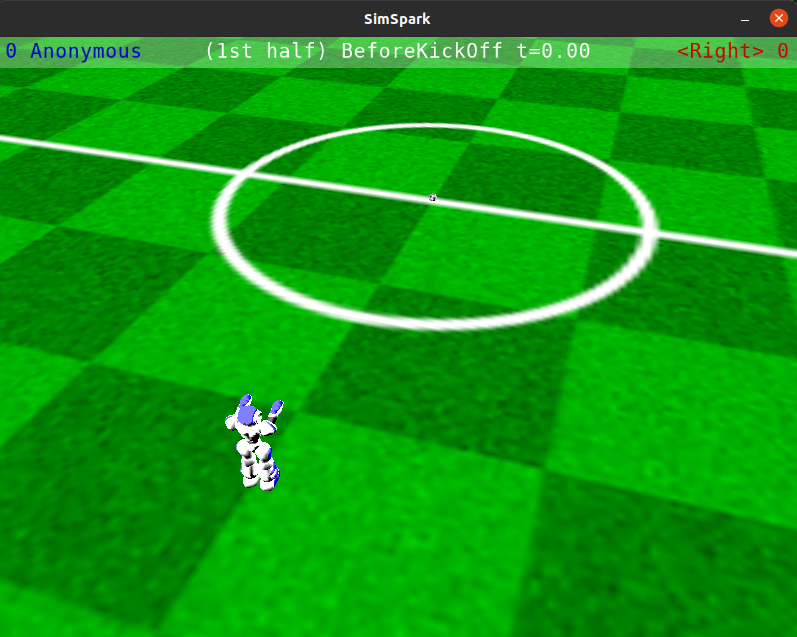
Let’s take a look at an example where we are trying to move the robot to four metres behind and facing the centre circle. The beaming coordinate of the robot is (-4.0, 0.0, 0.0). The method will be used as below:
// Create rcss3d_agent_msgs::msg::Beam
rcss3d_agent_msgs::msg::Beam beam;
beam.x = -4.0;
// Send Beam
rcss3dAgent.sendBeam(beam);
In the simulator, you should see the robot has moved to the requested pose as below:
Hinge Joint
The Hinge Joint Effector lets you request a velocity for a hinge joint from your robot. The following method is used for this:
void sendHingeJointVel(const rcss3d_agent_msgs::msg::HingeJointVel & j);
Let’s take a look at an example, where we will set the velocity of the head yaw (ie. he1)
to 1.0 rad/s. The method will be used as below:
// Create rcss3d_agent_msgs::msg::HingeJointVel
rcss3d_agent_msgs::msg::HingeJointVel hingeJointVel;
hingeJointVel.name = "he1";
hingeJointVel.ax = 1.0;
// Send HingeJointVel
rcss3dAgent.sendHingeJointVel(hingeJointVel);
In the simulation, you should see the robot’s head yaw obtain a velocity of 1.0 rad/s and turn left until it hits the joint limit as following:
See also
For a list of the name of hinge joint effectors of the Nao robot, refer to RoboCup 3D Simulation League’s Nao model.
Universal Joint
The Universal Joint Effector lets you request a velocity for a universal joint from your robot. The following method is used for this:
void sendUniversalJointVel(const rcss3d_agent_msgs::msg::UniversalJointVel & j);
The default Nao robot model doesn’t have any universal joints. The example below shows how to move the universal shoulder joint of SimSpark’s SoccerBot:
Let’s take a look at an example, where we will set the velocity of the left shoulder-body
joint (ie. lae1_2) for the SoccerBot to 1.0 rad/s and -1.0 rad/s around the first and second
axis:
// Create rcss3d_agent_msgs::msg::UniversalJointVel
rcss3d_agent_msgs::msg::UniversalJointVel universalJointVel;
universalJointVel.name = "lae1_2";
universalJointVel.ax1 = 1.0;
universalJointVel.ax2 = -1.0;
// Send UniversalJointVel
rcss3dAgent.sendUniversalJointVel(universalJointVel);
Say
The Say Effector permits communication among agents by broadcasting messages. Be sure to read about this effector’s dual, the Hear Perceptor, as it details restrictions upon what message content may be sent, and under what circumstances other agents will actually hear your messages.
Let’s take a look at an example, where we will send a message (ie. helloworld) to teammates:
// Create rcss3d_agent_msgs::msg::Say
rcss3d_agent_msgs::msg::Say say;
say.message = "helloworld";
// Send Say
rcss3dAgent.sendSay(say);
Synchronize
Note
This effector has no effect if simulator is running with the default real-time mode.
The Synchronize Effector must be used if the simulator is running with Agent Sync Mode. In Agent Sync Mode, agents must send a synchronize message at the end of each simulation cycle. Note that the server ignores this command if it is received in Real-Time Mode, so it is safe to configure your agent to always call the synchronize effector.
To use, simply call the sendSynchronize() method as below:
rcss3dAgent.sendSynchronize();
When running in Agent Sync Mode, if the simulator with the agent moves forward in time, you are calling this effector correctly.